Handle — двухметровый робот от Boston Dynamics
02.03.2017 роботы технологии
Boston Dynamics — известная инженерная компания, специализирующаяся в робототехнике, которая периодически радует интересными и забавными видео с роботами.
Последнее видео посвящено роботу Handle. Заодно и других вспомним за последний год.

Президентом компании является Марк Райберт, который создал её в 1992 году на основе группы инженеров Массачусетского технологического института.
Atlas — один из самых известных роботов Boston Dynamics.

Антропоморфный робот, предназначенный для передвижения по пересечённой местности. Ходит на двух ногах, может использовать свободные руки для переноса груза или при карабкании на вертикальные препятствия.
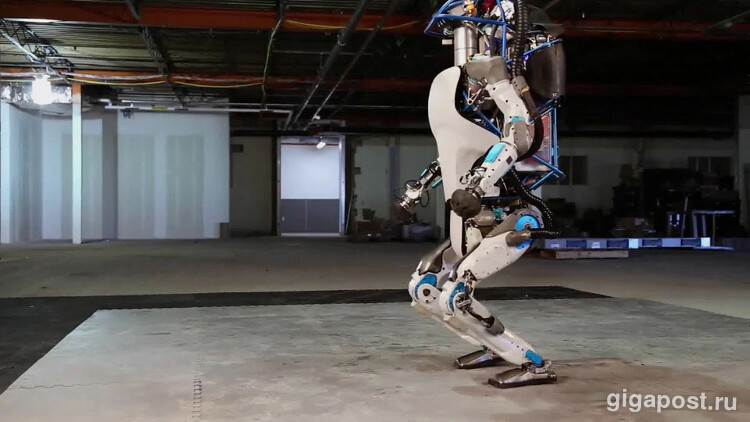
Смотрите видео с ним:
Компания Boston Dynamics была куплена корпорацией Google Inc. в декабре 2013 года. Но, видимо, до настоящего Терминатора еще очень далеко, и в марте 2016 года Google решила продать Boston Dynamics, поскольку «она вряд ли сможет выпустить коммерчески успешный продукт в ближайшее время».
Это робот SpotMini. Он похож на помесь динозавра и жирафа. SpotMini получил функциональную «шею» с подобием головы. С ее помощью он умеет захватывать различные предметы.

Весит робот 25 килограмм без «шеи» и 30 килограмм вместе с ней. Робот передвигается за счет электромоторов. На одном заряде SpotMini может проработать до 90 минут. У робота имеется полный набор датчиков на борту для навигации практически в любой среде.
А это последнее видео, выпущенное на днях, посвященное роботу Handle. Это робот высотой около 2 метров, способный двигаться со скоростью до 4 м/с и прыгать в высоту на 1,2 метра. Отличительной особенностью робота является то, что на его задних ногах находятся колёса.

Может проехать 24 км на одной заряде аккумулятора. Впрочем, смотрите сами: